


|
Добрый день. Подскажите пожалуйста, я прошел ваш курс Введение в линейную алгебру: Информация, - сдал экзамен и у меня высветилось окно, где необходимо оформить доставку сертификата. Однако, я случайно закрыл это окно и теперь не могу найти этот подраздел, чтобы оформить доставку. Где можно это найти? |
Опубликован: 09.10.2007 | Доступ: свободный | Студентов: 4559 / 795 | Оценка: 4.09 / 3.28 | Длительность: 11:25:00
Тема: Математика
Специальности: Математик
Теги:
Лекция 10:
Подпространства линейного пространства. Евклидово пространство. Линейные преобразования в линейном пространстве. Представление линейного преобразования матрицей. Действия над линейными преобразованиями. Примеры линейных преобразований
Примеры линейных преобразований
Пример 1. Пусть преобразование А есть поворот всех векторов 0Х плоскости х0y, т.е. поворот плоскости х0y вокруг начала координат на угол  против часовой стрелки. Это преобразование линейно, так как безразлично, сначала ли сложить векторы а и b, а потом повернуть их на угол , или сначала повернуть векторы на указанный угол, а потом сложить их (рис. 9.1, а).
против часовой стрелки. Это преобразование линейно, так как безразлично, сначала ли сложить векторы а и b, а потом повернуть их на угол , или сначала повернуть векторы на указанный угол, а потом сложить их (рис. 9.1, а).
Так же будет безразлично умножить ли сначала вектор а на число  , а затем повернуть его на угол , или сделать это в обратном порядке (рис. 9.1, б).
, а затем повернуть его на угол , или сделать это в обратном порядке (рис. 9.1, б).
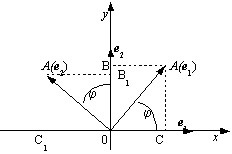
Чтобы построить матрицу рассматриваемого линейного преобразования - поворота на угол , выберем в рассматриваемом евклидовом пространстве V2 базис из двух единичных взаимноперпендикулярных векторов е1 и е2. Вектор е1 после поворота на угол перейдет в вектор А(е1), который также будет являться единичным и образовывать с исходным вектором е1 угол , а с вектором е2 угол  (рис. 9.2). Из (рис. 9.2) очевидно, что
(рис. 9.2). Из (рис. 9.2) очевидно, что
 |
( 9.16) |
Но  . Тогда, подставив полученные значения
. Тогда, подставив полученные значения  и
и  в равенство (9.16), получим
в равенство (9.16), получим
 |
( 9.17) |
Аналогично рассуждая, из рис. 9.2 можно получить формулы преобразования для вектора А(е2):
 |
( 9.18) |
Но  . Тогда, подставив полученные значения
. Тогда, подставив полученные значения  в равенство (9.18), будем иметь
в равенство (9.18), будем иметь
 |
( 9.19) |
Из равенств (9.17) и (9.19) найдем матрицу


Пример 2. Пусть в пространстве V2 каждому вектору х ставится в соответствие вектор у = А(х), представляющий собой зеркальное отображение вектора х относительно некоторой фиксированной прямой  , проходящей через точку 0, которая принимается за начало всех векторов
, проходящей через точку 0, которая принимается за начало всех векторов  (рис. 9.3). Преобразование А в этом случае является линейным и называется зеркальным отображением относительно прямой . Примем за базис два единичных взаимно ортогональных вектора (рис. 9.4), один из которых направим по прямой . Найдем матрицу этого преобразования.
Базисный вектор е1 преобразуется в вектор А(е1) = е1, а вектор е2 - в вектор А(е2) = -е2, т.е. А(е1) = е1 = 1 x е1+0xе2, А(е2) = -е2 = 0xе1 + (-1)xе2. Тогда в выбранном базисе матрицы A' и А имеют вид:
(рис. 9.3). Преобразование А в этом случае является линейным и называется зеркальным отображением относительно прямой . Примем за базис два единичных взаимно ортогональных вектора (рис. 9.4), один из которых направим по прямой . Найдем матрицу этого преобразования.
Базисный вектор е1 преобразуется в вектор А(е1) = е1, а вектор е2 - в вектор А(е2) = -е2, т.е. А(е1) = е1 = 1 x е1+0xе2, А(е2) = -е2 = 0xе1 + (-1)xе2. Тогда в выбранном базисе матрицы A' и А имеют вид:

Пример 3. Определим линейное преобразование А, переводящее каждый вектор  в
в  , где - фиксированное число из поля К, т.е.
, где - фиксированное число из поля К, т.е.  , которое называется преобразованием подобия. Найдем его матрицу. Для базисных векторов е1, е2, ..., еn имеем
, которое называется преобразованием подобия. Найдем его матрицу. Для базисных векторов е1, е2, ..., еn имеем


Пример 4. Если  преобразование А переводит вектор х сам в себя А(х) = х, то такое преобразование тоже линейно, называется тождественным и обозначается Е
преобразование А переводит вектор х сам в себя А(х) = х, то такое преобразование тоже линейно, называется тождественным и обозначается Е

Таким образом, матрица тождественного преобразования Е в любом базисе есть единичная матрица

Пример 5. Если преобразование А переводит вектор х в нулевой А(х) = 0, то такое преобразование является линейным и называется нулевым.

Матрица нулевого преобразования в любом базисе есть нулевая матрица V:

Арсений Черномаз