Будущее робототехники
В 2014 г. было предложено устройство с функцией роста, которое использовало технологии аддитивного производства в теле робота. Это устройство способно вертикально проникать в почву, воспроизводя процесс роста из верхушки корня растений. Позднее, в 2017 г., был разработан робот, включающий в себя миниатюрный 3D-принтер внутри "верхушки корня", который использовал термопластичную нить для формирования полого тела. В наконечнике устройства были встроены датчики и блок управления, который определял направление роста и позволял роботу обходить препятствия. Изгиб конструкции достигался путем нанесения различного количества материала на противоположные стороны растущего тела робота.
В отличие от модульного механизма роста, где увеличение тела робота происходит дискретно и лимитировано размерами модулей, роботы, имитирующие рост, способны непрерывно изменять размеры своего тела, регулируя скорость осаждения нити или путем раздувания камеры.
В будущем растущие роботы должны быть способны самостоятельно формировать свою структуру и совершенствовать функциональные возможности, используя материалы, доступные в окружающей среде.
Биовдохновение и целеполагание искусственных организмов
Возможности обучения и адаптации роботов к окружающей среде не позволяют говорить о подлинной автономности, поскольку поведение робота определяется программным обеспечением, спроектированным человеком.
Способность выбирать свои собственные цели представляет более высокий уровень автономности. Когда речь заходит о поведении человека, мы не сомневаемся в том, что цели, которые он преследует, принадлежат именно ему. В контексте современных роботов мы предполагаем, что эти агенты способны выбирать свои действия для достижения целей. Однако сами эти цели, которые роботы стремятся достичь, устанавливаются людьми, программировавшими их поведение.
Некоторые ученые полагают, что появление сильного искусственного интеллекта и возможность целеполагания у ИИ могут быть достигнуты именно благодаря тесному взаимодействию между ИИ и его физическим телом. Концепция воплощенного искусственного интеллекта предполагает, что интеллект робота формируется через его взаимодействие с окружающей средой, на основе обучения методом проб и ошибок и формирования таким образом у агента представлений о свойствах внешнего мира.
Согласно мнению авторов статьи [ "Источники использованной литературы" ], вопрос о принадлежности целей агенту связан с интеграцией между телом, системой управления и целями предпринимаемых действий. В природе такая интегра ция сформировалась в процессе развития тела и мозга животных, взаимодействующих с окружающей средой, в течение длительной эволюции.
То есть цели могут принадлежать системе в том случае, если они возникают из продолжающихся попыток организма поддерживать и воспроизводить себя, преодолевая сопротивление внешней среды. Современный автономный робот должен осуществлять функции самоконтроля и самоподдержания - например, регулярно проверяя и пополняя запас энергии аккумуляторов. Но при этом, в отличие от живых организмов, робота можно выключить на неопределенное время и запустить позже без принципиальных проблем. Большинство конструкционных материалов, из которых сегодня создаются роботы, могут сохраняться и без питания, и отдельно от целого организма. Органическая же материя, не являясь частью функционирующего организма, распадается.
Авторы упомянутой статьи выражают мысль о том, что именно способность живой материи к самопостроению, когда система порождает саму себя без четкого разделения на производителя и продукт, является основой возникновения целеполагания. Это целенаправленное стремление обеспечивает живым организмам борьбу за выживание в окружающей среде.
Новые материалы и способы производства роботов
В предыдущих разделах мы уже коснулись вопросов, связанных с созданием новых материалов, упомянув такое направление как мягкая робототехника. Обсуждая мягкую робототехнику, мы отметили, что ученые и инженеры научились создавать тела роботов из материалов с высокой податливостью. В отличие от тел человека и животных, физическая структура традиционных роботов была очень жесткой, что ограничивало их подвижность и возможности взаимо- действия с окружающей средой. Поэтому мягкая робототехника в целом может быть отнесена к направлению развития робототехники, вдохновленному принципами построения биологических систем.
Обладая высокой податливостью, новые материалы также приближают мягких роботов к температурному режиму, свойственному живым организмам.
На рис. 14.10 показаны некоторые материалы, из которых созда- ются мягкие роботы (эластомеры, электроактивные полимеры 4Электроактивные полимеры - это полимеры, изменяющие форму при приложении к ним электрического напряжения. Они могут использоваться как двигатели, так и в качестве сенсоров гидрогели). Видно, что данные материалы обладают высокой податливостью, однако сохраняют свои свойства в весьма ограниченном температурном диапазоне.
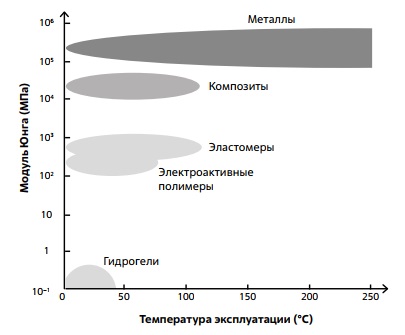
Источник: [ "Источники использованной литературы" ]
Таксономия в области мягкой робототехники еще не устоялась. Мы приведем несколько классификаций от разных исследователей.
Соотношение понятий жесткие, мягкие и непрерывные роботы наглядно демонстрируется на рис. 14.11. Роботы с жесткими звенья- ми обычно имеют 6 степеней свободы, но могут иметь и избыточное число степеней свободы (более 6). Непрерывные роботы, способные произвольно изгибаться, могут иметь внутренние ребра жесткости, но могут быть и полностью мягкими.
Можно выделить два основных направления в создании мягких роботов. В первом случае для обеспечения устойчивости тела робота, помимо мягких материалов, применяются жесткие или полужесткие каркасные конструкции. Во втором случае все тело робота является мягким, подобно телам дождевых червей или осьминогов. Эти роботы относятся к категории континуумных мягких роботов, поскольку их тела состоят из единой гибкой структуры.
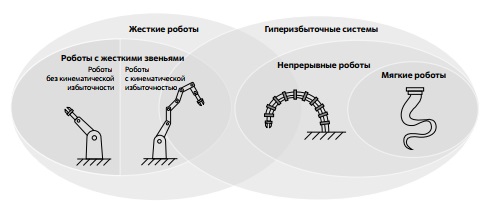
Источник: по материалам [ "Источники использованной литературы" ]
Роботы последнего типа обладают уникальной способностью из- менять свою форму и состояние, что делает их легко адаптируемыми к переменным условиям окружающей среды. Они могут выполнять задачи, которые для других роботов непосильны: проникать в узкие отверстия, значительно меньшие их собственных размеров, буквально переливаясь из одной области в другую, передвигаться в тесных пространствах, гибко деформироваться в широком диапазоне, не оказывая при этом значительного механического воздействия на окружающую среду.
По типу материала мягкие роботы можно разделить на твердо-мягкие, полужидкие (мягкие на жидкой основе) и даже жидкие (рис. 14.12).
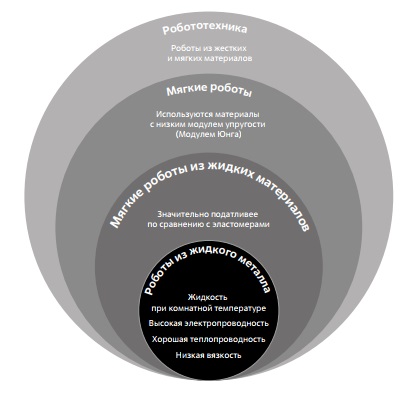
Источник: [ "Источники использованной литературы" ]
Естественно, мягкие роботы также подпадают под классификацию по ряду параметров, рассмотренных ранее, таких как тип привода (электрический, пневматический, гидравлический) и степень автономности, среди прочих.
Существует категория мягких роботов, известных как "гибкие континуумные роботы" (Compliant Continuum Robots, CCRs). Они изготавливаются из эластичных материалов, таких как силикон, резина и другие, и обычно имеют продолговатую форму (один размер значительно превышает два других). Эти роботы широко применяются в условиях ограничений для выполнения манипуляций, в частности, в малоинвазивной хирургии.
CCR могут отличаться по системе привода (роботы с тросовым приводом, пневматические CCR-роботы, роботы с памятью формы), а также по прототипу, (например, роботы, имеющие сходство с хобо- том, осьминогом и т. д.) (рис. 14.13).
CCR подразделяются на полумягкие континуумные роботы (semi- soft continuum robots) и мягкие континуумные роботы. Полумягкие CCR, в отличие от мягких, могут содержать внутри конструкции элементы жесткости, такие как диски или стержни.
Относительно недавно были созданы магнитно-мягкие континуумные роботы субмиллиметрового масштаба, которые размывают границу между полумягкими и мягкими CCR. Эти роботы используют магнитную жидкость, которая может превращаться в упругое твердое тело под воздействием магнитного поля.