Санкт-Петербургский государственный университет
Опубликован: 12.07.2013 | Доступ: свободный | Студентов: 247 / 40 | Длительность: 09:36:00
Специальности: Программист
Теги:
Лекция 4:
Проект "Мультиагентная система для БПЛА"
БПЛА-агент для автономной группы
Выше была описана система управления группой БПЛА. Основное отличие группы от привычного комплекса БПЛА – это автономное общение БПЛА-агентов между собой. Для того, чтобы реализовать мультиагентную систему для управления группой БПЛА, необходимо пересмотреть аппаратное оснащение одиночного БПЛА.
Рассмотрим приведенную в предыдущей главе трехуровневую систему с точки зрения аппаратной реализации [ 4.9 ] .
На верхнем уровне управления нами применяется компьютер – базовая станция (ноутбук, нетбук или стационарный ПК), оснащённый различными средствами связи (радиомодемом, Wi-Fi модемом, Интернет модемом) (рис.7.3). Основными задачами базовой станции являются:
- определение глобальной миссии группы БПЛА-агентов (параметры территории исследования, задание способов исследования, высота полёта и т.д.);
- разбиение глобальной задачи на части и формирование начальной индивидуальной задачи для каждого БПЛА-агента группы в зависимости от количества БПЛА-агентов и поставленной перед группой задачей;
- обмен информацией с БПЛА-агентами, находящимися в зоне связи;
- сбор и обработка информации от БПЛА-агентов группы;
- формирование новой глобальной миссии для группы в зависимости от поступающей на базовую станцию новой информации.

На среднем уровне управления БПЛА-агента находится бортовой микрокомпьютер – головное устройство системы управления БПЛА. Его основная цель – выполнить поставленную ему задачу с наименьшими затратами по времени и ресурсам [ 4.6 ] . Для этого он выполняет пять основных функций:
- генерация обновлений к программе полета для автопилота;
- обработка данных навигационного оборудования и телеметрии;
- работа с дополнительным оборудованием;
- общение с микрокомпьютерами других БПЛА (если работа ведется в группе);
- отправка данных на базовую станцию и получение от нее новых заданий.
С базовой станции микрокомпьютер получает общие задачи (начальное состояние, конечные точки, задача для группы и т.п.). При групповом полете общая задача разбивается на частные для каждого БПЛА. В процессе выполнения задачи микрокомпьютер осуществляет общение с другими членами группы, находящимися в радиусе действия радиосвязи. Взаимодействие в группе позволяет группе БПЛА эффективнее выполнить общую задачу, а также избежать столкновений.
На основе полученных данных от базовой станции, с навигационного оборудования и при общении с другими БПЛА, микрокомпьютер может сгенерировать новую программу для автопилота, если старая не поддерживает нужных требований для выполнения общей задачи.
При пролете БПЛА в зоне связи с базовой станцией микрокомпьютер отправляет новые накопленные им данные и получает новые задания. При этом накопление данных происходит не только за счет собственных сенсоров и датчиков, но и при связи с другими БПЛА. Как говорилось выше, в микрокомпьютер закладывается отдельная для него задача и общая задача группы. В процессе общения микрокомпьютер накапливает информацию о выполнении общей задачи. Данные о выполнении своей частной задачи он получает сам, используя бортовые датчики.
Связь с базовой станцией осуществляется за счет отдельного радиоканала или через GPRS по GSM модему. GSM модем легко интегрируется с микрокомпьютером, но для передачи данных пакеты необходимо сжимать.
Cвязь между микрокомпьютерами разных БПЛА осуществляется за счет встроенного радиоприемника с частотой 2,4 GHz и протоколом общения 802.11 n (Wi-Fi), в котором применяется технология, связывающая два ближайших канала в один. Таким образом, микрокомпьютеры в БПЛА смогут одновременно принимать и отправлять информацию друг другу. Связь с базовой станцией осуществляется за счет отдельного радиоканала или через GPRS по GSM модему [ 4.9 ]
За счёт небольшого веса БПЛА взлёт осуществляется с рук человека или с катапульты. Посадка – либо за счёт встроенного парашюта, либо за счёт "перехвата" на ручное управление.
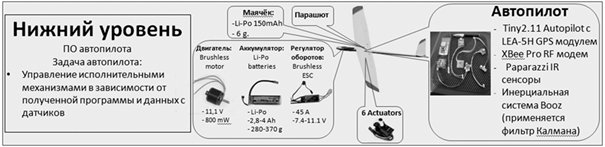
Нижний уровень управление осуществяется автопилотом БПЛА-агента (рис.7.4). Автопилот – устройство с микроконтроллером с системой реального времени. Основная задача автопилота состоит в управлении исполнительными механизмами (сервоприводами, мотоустановкой, дополнительным оборудование), основываясь на записанной ему программе полёта и информации с датчиков (инерциальной системы, инфракрасных датчиков, датчиков давления и скорости и т. п.).
Таким образом, аппаратная реализация трехуровневой системы, которая нужна для создания мультиагентной сети управления группой БПЛА, возможна
Алгоритмы групповой работы сети БПЛА
Во введении были перечислены преимущества, которыми обладает группа взаимодействующих БПЛА-агентов по сравнению с использованием одного БПЛА. В разделе 3 описана аппаратная возможность построения группы БПЛА-агентов. В этом разделе мы рассмотрим два основных типа алгоритмов управления полётом БПЛА: алгоритм мониторинга местности на примере исследование экологической ситуации и алгоритм оптимизации полёта БПЛА на примере использования термических потоков для увеличения дальности полёта [ 4.6 ] .
При использовании группы БПЛА для мониторинга местности (рассмотрим задачу исследования экологической обстановки в акватории залива, например, разлив нефти) работа системы организуется следующим образом:
- Выбирается тип задачи (в выбранном примере – поиск нефтяных пятен и источника их образования).
- В зависимости от площади исследуемой территории, количества БПЛА в группе и их характеристек территория разделяется на участки, и формируются отдельные задачи для каждого члена группы (для выбранного примера задача будет стоять таким образом: поиск аномалии интенсивности цвета поверхности акватории).
- В микрокомпьютер каждого БПЛА группы записывается глобальная задача (параметры исследуемой территории и т. п.) и отдельная задача этого БПЛА-агента.
- Каждый агент приступает к выполнению поставленной ему задачи.
Когда в зону Wi-Fi видимости одного БПЛА из группы попадает другой при "общении" происходит передача между агентами накопленной информации и, при необходимости, взаимное уточнение отдельных задач. Таким образом, по ходу выполнения частной задачи, все агенты накапливают информацию о ходе решении общей задачи группы, а также локально принимают решения о корректировке своих частных задач для более эффективного выполнения общей. (Например, для выбранного нами примера, группа БПЛА исследует территорию на предмет нефтяных пятен, все БПЛА исследуют разные квадранты. При обмене информацией между членами группы выясняется наличие пятен в одном из квадрантов. По ходу выполнения задания вся группа перестраивает задачу, которая сводится к поиску источника разлива нефти.)
Базовые наземные станции, обеспечивая связь с центром обработки данных (ЦОД), принимают/передают информацию от БПЛА, находящихся в их зоне видимости или поддерживающих связь через Интернет. Т.к. в процессе общения между БПЛА информация о выполнении общей задачи накапливается во всех микрокомпьютерах группы, то данные даже от тех самолетов, которые редко выходят на связь, все равно попадает в ЦОД.
Полученная в ЦОДе информация обрабатывается и визуализируется для заказчика (выдается карта с нанесенными исследуемыми характеристиками).
Наличие обратной связи с мобильными агентами (БПЛА) позволяет оперативно формировать из ЦОДа инструкции по корректировке их заданий.
Такой алгоритм действия группы подходит к любым задачам визуального мониторинга территории. Основные отличия будут состоять в типе искомого сигнала и в соответствующем дополнительном оборудовании для поиска этого сигнала.