Спонсор: Intel
Вы можете этот курс.
Северный (Арктический) федеральный университет им. М.В. Ломоносова
Опубликован: 23.10.2013 | Доступ: свободный | Студентов: 1822 / 663 | Длительность: 09:26:00
Специальности: Программист
Лекция 6:
Модуль отслеживания 2D/3D объектов Intel Perceptual Computing SDK
dcvTracker::GetTargetName
Метод возвращает имя объекта (цели).
Синтаксис:
const pxcCHAR* GetTargetName ( pxcI32 targetIndex )
Параметры:
targetIndex - индекс дели, чей результат требуется
Возвращает:
Имя цели, иначе NULL если targetIndex не совпадает ни с одной целью.
dcvTracker::GetTargetType
Метод возвращает тип цели.
Синтаксис:
TargetType GetTargetType ( pxcI32 targetIndex )
Параметры:
targetIndex - индекс цели, чей результат требуется
Возвращает:
Тип цели, иначе TARGET_UNDEFINED если targetIndex не совпадает ни с одной целью
dcvTracker::GetTargetData
Метод выводит полный набора данных о соответствующей цели после последнего распознавания/отслеживания.
Синтаксис:
pxcStatus GetTargetData( pxcI32 targetIndex, TargetData* targetData )
Параметры:
targetIndex - индекс цели, чей результат требуется
targetData – вывод полного набора данных о соответствующей цели после последнего распознавания/отслеживания.
Возвращает:
PXC_STATUS_NO_ERROR в случае успеха
PXC_STATUS_HANDLE_INVALID если dcvTracker не инициализирован
PXC_STATUS_ITEM_UNAVAILABLE если targetIndex не совпадает ни с одной целью
dcvTracker::GetTargetStatus
Этот метод дает прямой доступ к отслеживанию статуса цели.
Синтаксис:
TrackingStatus GetTargetStatus ( pxcI32 targetIndex )
Параметры:
targetIndex - индекс цели, чей результат требуется.
Возвращает:
STATUS_UNINITIALIZED если цель не инициализирована
STATUS_RECOGNITION если цель находится в режиме распознавания, то есть ниодин ключевой кадр не был распознан
STATUS_TRACKING если цель находится в режиме отслеживания, то есть ключевой кадр был распознан
dcvTracker::GetTrackedKeyframeIndex
Параметры:
targetIndex - индекс цели, чей результат требуется.
Возвращает:
Текущий индекс отслеживаемого ключевого кадра, или -1 если ни один ключевой кадр не был распознан.
dcvTracker::GetTrackedPosition
Метод возвращает позицию последнего распознанного ключевого кадра
Синтаксис:
pxcStatus GetTrackedPosition( pxcI32 targetIndex, pxcF64 position[3] )
Параметры:
targetIndex - индекс цели, чей результат требуется.
position – позиция последнего распознанного ключевого кадра. Если ни один ключевой кадр не были отслежены во время последнего процесса, этот параметр не будет изменен.
Возвращает:
PXC_STATUS_NO_ERROR в случае успеха
PXC_STATUS_HANDLE_INVALID если dcvTracker не инициализирован
PXC_STATUS_ITEM_UNAVAILABLE если targetIndex не совпадает с распознанной реальной целью
dcvTracker::GetTrackedOrientation
Этот метод возвращает прямой доступ к ориентации последнего отслеживаемого ключевого кадра соответствующей цели.
Синтаксис:
pxcStatus GetTrackedOrientation( pxcI32 targetIndex, pxcF64 orientation[4] )
Параметры:
targetIndex - индекс цели, чей результат требуется.
orientation - ориентация последнего отслеживаемого ключевого кадра соответствующей цели.
Возвращает:
PXC_STATUS_NO_ERROR в случае успеха
PXC_STATUS_HANDLE_INVALID если dcvTracker не инициализирован
PXC_STATUS_ITEM_UNAVAILABLE если targetIndex не совпадает с распознанной реальной целью.
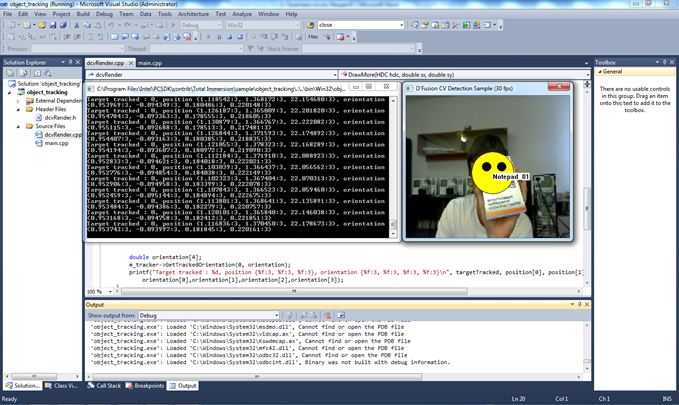
Пример приложения, выполняющего отслеживание объекта, по заранее созданному сценарию, и дополнение его информацией: